1.模擬発電機の改造
本自動電圧調整装置から発電機を励磁して、その発電特性を取るため、発電機とモーターからなる試験装置を製作した。(1)発電機について
励磁装置の試験の為に、発電機として安価な車の発電機(内部は同機三相交流発電機で、内部で直流に変換している)を改造して固定子及びコレクターの端子を引き出し、試験に使用する。
分解前の発電機
 |
HONDA AHGA56 判っている仕様 電圧 14V 電流80A 1.12kW? モビリオスパイク用(フィットでも使用されている) yahooオークションの中古品で1,500円+送料1,400円 2,900円 で購入しました。 発電機自身は三菱製の様です。 |
一般的なIC型電圧調整装置発電機 回路図
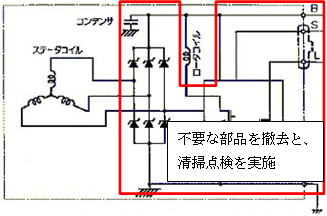 |
主な部品は右からプーリー側軸ケース、ステータ鉄心、コレクターリングブラシ(以下ブラシ)側軸ケースの3つに分けられる。 中古なので、内部の電子部品は全て撤去し固定子とブラシを直接電線で引き出し、コレクターリングが荒れていれば、手入れして組み立てる事にした。 |
購入品のリスト
| 品名 | 型式・仕様 | |
| モータ | Panasonic | 新Gシリーズ 可変速タイプインダクションモータ(60W) M91Z60SV4LS |
| 新Gシリーズ スピードコントローラ MGSDB1 | ||
| 内ベースタイプ104φタイプ M9B3 | ||
| 共用ソケット | 丸型 P2CF (表面接続) | |
| 標準Vプーリー | A-1 | |
| バンコラン丸ベルト | 3φ×390mm | |
分解 組み立て時にブラシに注意が必要、コレクターリングの手入れが必要!




最終分解状況



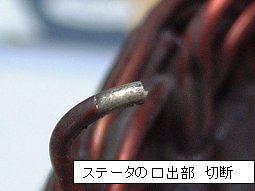
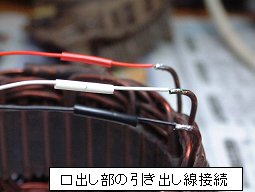
口出しの部の引き出し線は今回負荷試験をしないため、細い線で引出しを行った。





組立






試験用駆動モータ
モータ入荷
発電機より大きいが出力60Wの誘導電動機 プリーの加工中







発電機試験装置の完成


2.発電機の特性試験
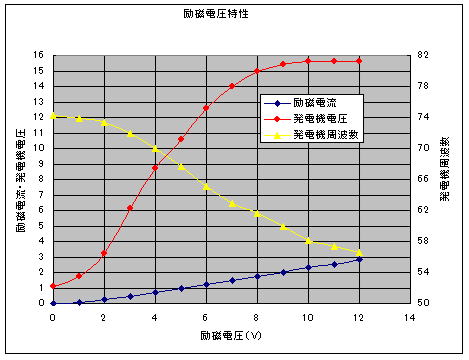
(1)発電機の特性試験 1励磁試験 DC電源発生器により励磁し、その時の発電機の特性を計測する。

測定日 2012年6月23日
気温 25.4 (℃)
| モータ回転速度 | 励磁 | 発電機 | |||
| TG周波数 (Hz) |
換算値 (min-1) |
電圧 (V) |
電流 (A) |
電圧 (V) |
周波数 (Hz) |
| 349.2 | 1,746 | 0 | 0.001 | 1.12 | 74.23 |
| 348.2 | 1,741 | 1 | 0.085 | 1.72 | 73.88 |
| 348.0 | 1,740 | 2 | 0.235 | 3.24 | 73.40 |
| 347.0 | 1,735 | 3 | 0.468 | 6.16 | 71.88 |
| 345.7 | 1,729 | 4 | 0.712 | 8.72 | 69.95 |
| 344.1 | 1,721 | 5 | 0.944 | 10.60 | 67.71 |
| 342.2 | 1,711 | 6 | 1.228 | 12.60 | 65.10 |
| 340.3 | 1,702 | 7 | 1.472 | 14.00 | 62.88 |
| 338.5 | 1,693 | 8 | 1.753 | 15.00 | 61.55 |
| 337.3 | 1,687 | 9 | 2.006 | 15.40 | 59.95 |
| 336.2 | 1,681 | 10 | 2.292 | 15.60 | 58.11 |
| 335.2 | 1,676 | 11 | 2.537 | 15.60 | 57.39 |
| 334.7 | 1,674 | 12 | 2.849 | 15.60 | 56.54 |
発電電圧 周波数測定 ATTEN ADS1102CAL 100MHz 1GSa/s DIGITAL STORAGE OSCILLOSCOPE
モータ回転速度 周波数計 METEX P-10
電圧発生器 IWATSU SP6005P 60V 5A PROGRAMMABLE POWER SUPPLY
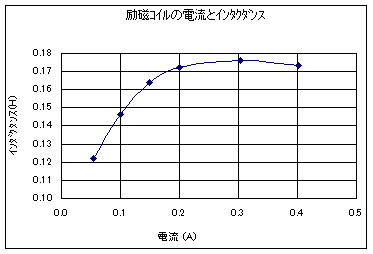
(2)発電機の回転子のインダクタンス測定
スライダックと電圧・電流を測り、60Hzでのインダクタンスを計測する。

スライダック 東京理工社 100V 0-130V 5A(MAX)
電流計 HIOKI 3256 レンジ (mA)
電圧計 METEX P-10
測定日 2012年7月7日
気温 28.4 (℃)
抵抗値 4.1 (Ω)
| 試験No | 1 | 2 | 3 | 4 | 5 | 6 | |
| 電圧 | (V) | 2.503 | 5.55 | 9.29 | 13.08 | 20.12 | 26.27 |
| 電流 | (A) | 0.0543 | 0.1002 | 0.1499 | 0.2008 | 0.303 | 0.4018 |
| 周波数 | (Hz) | 60 | 60 | 60 | 60 | 60 | 60 |
| Z= | (Ω) | 46.0958 | 55.3892 | 61.9746 | 65.1394 | 66.4026 | 65.3808 |
| XL= | (Ω) | 45.9131 | 55.2373 | 61.8389 | 65.0103 | 66.2759 | 65.2521 |
| L= | (H) | 0.12185 | 0.1466 | 0.16412 | 0.17253 | 0.17589 | 0.17317 |
 |
 |
3.回転子へ励磁電流を供給する方法
PWMで電力をコントロールし、FETのアンプにより励磁コイルに励磁電力を供給する方法は2つ考えられる。| 方法 | 利点 |
| 励磁コイルを直接ドライブする方法 | 簡単・制御応答が速いが、FETにより、直接励磁コイルに電力を供給するため、PWM(方形波)による逆起電力の変化が大きくこれによるスパイクノイズを取り除くのが難しい |
| 平滑回路を通して供給する方法 | 平滑回路を間に入れるため、回路は上記より複雑、応答速度が遅くなると思われるが、励磁コイルから見れば、電圧の変化は平滑回路から出るリップルしかなく、これによる逆起電力は極めて小さいため、波形にスパイクノイズは無いと思われる。 |
今回は以上2ケースの回路を使用して、対応策も含め検討して見たい。
まずは、励磁コイルを直接ドライブする方法について説明したい。
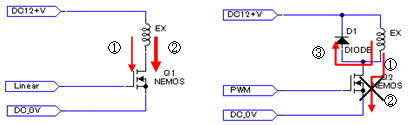
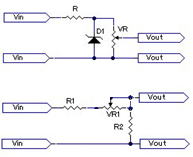
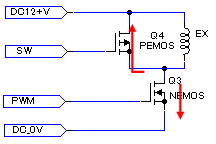
電源の電圧調整方法の違いからくるアンプ回路(超概略)の違い『Ⅱ.自動電圧調整装置の概要2.電圧調整装置の動作概要で説明したb.スイッチングレギュレータ型でサイリスターを使用した調整装置の概略説明をしたが、今回はFETを使用し電流0の所で電流を切らないため下記の様になる。
図左については、NMOSのゲートには、連続する(①~②にリニアで)制御信号が入力されるので、(D)-(S)についても連続する電流が流れる。しかし、右図の回路では、NMOSのゲートには、パルス信号が入るため、インダクタンス負荷の場合、パルス信号がH→Lの時に発生する②逆起電力が(D)-(S)間耐圧より大きくなるとFETが破損する事から、D1と言う物を入れ、その電力を消費させる③の所が違いとなる。
コイルから見れば、この逆起電力の電流方向は、FETがONになっている時と同じ方向なので、この電流をうまく流す事により、損出を減らす事が出来るが、ダイオードには、順方向電圧(約0.6→電流により上昇し1V以上になる事も有る)が必要となり、逆起電力によるEXで消費する電力から見るとこれが、熱損失となり、効率低下となる、又影響は少ないが、FETの(D)-(S)間耐圧について、電源電圧+D1の順方向電圧が加わる事になる。
このため、実際の回路では、D1の代わりにFETによりスイッチする事も考慮する。
 |
今回、試験で使用した発電機については、12(V)の3(A)と言う事から、実態に有った設計をするためFDS6612A 30V 8.4A 30mΩ(VGS4.5V)(10個で200円)を使用する。またD1は動作が速いショットキーダイオード SK54 40V 5Aを使用する。 | |
 |
なお、もっと耐圧を大きくした場合は、2SK2382(NMOS)を使用したい。(秋月通商で1個100円)仕様は、『耐圧がVDss=200VでID=15A PD=45W RDS=0.13Ω』なので、ダイオードの順方向電圧による損出から見ると、RDSの抵抗値は低いとは言えない、今回必要な電流3(A)で順方向電圧が0.4(V)になるため、ダイオードより良いと考えられる。 将来的に、大電力を制御できるFETを今回開発したAVR装置でドライブ出来ることを確認したい。 |
4.励磁回路(A/D変換)と電圧発生試験
A/D入力の回路の検討が必要でしたが、回路図は下記のとおりとした。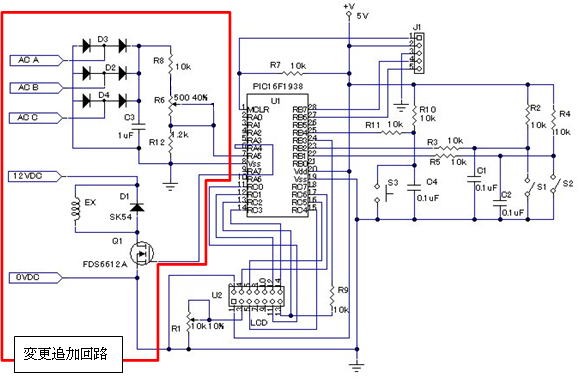
(1)A/D変換回路
今回の設計条件として、
・ 入力電圧調整用の抵抗を調整時にPICを破損させない回路とすること。
・ A/D側の最大許容電圧は5.5(V) 。(PICデータシートより)
・ A/Dから見た電源側のインピーダンスを10kΩ以下とする。(PICデータシートより)
・ 抵抗の最大許容消費電力の1/5程度とする。(経験値)
・ 最大計測電圧値と調整範囲 測定値は20.48(V)で±5(%)以上の調整範囲とする
・ 入力電圧の最大は25(V)が装置に入っても制御回路が故障しない事。
・ 手持ちの表面取り付け型、半固定の抵抗を使用する。10kΩ,20kΩ,50kΩ
 |
最初の用件については、現在A/Dの設定は、VREF+はAVDDになっているため、AVDD=VDDとすると今回は5(V)になっているので、PICデータシートによれば、5.5(V)となっている。簡単に出来るのは、A/D側に5.1~5.4(V)のツェナーダイオーを付ける事とそのダイオードを保護するため、調整用のボリュームをA/D側に取付ける事が思いつくが、入力電圧を15(V)までとする事で、コスト低減からこのツェナーダイオードを無くする事も出来る。 なお半固定抵抗は、経年劣化で接触不良となることが多いので、3端子の内稼動部と両端どれかの端子を短絡して使用する。 この事により、稼動部の接触子が接触不良になっても、アナログ入力端子にそのままの入力電圧が入らない様にする。(制御回路が正常なら瞬間だけ過電圧になるだけなのだが・・) |
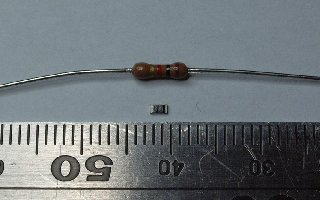
最大許容電力は、手持ちの抵抗は1/10Wなので、1/50W=20mW程度で設計する。
上段の抵抗がリード線タイプの1/4W抵抗下が表面取り付けタイプの抵抗1/10Wで何れも1kΩです。
 |
 |
ただし、データシート380Pを見ると『特性解析されたものですが、検証されていません。』と値が記載されていないので、注意が必要。(初期化の時にフラグを見て待つ必要があるかも・・・)
計算結果 入力側抵抗 10 kΩ 可変抵抗 500Ω 直列抵抗 1kΩ
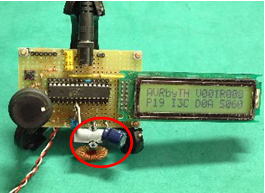
回路を追加した裏面基板状況
 |
 |
| 左から D1,FET,R12,R8,D2~D4 | 左から D2~D4,R6=VR,端子,G ,EX+ |
(2)電圧発生試験
試験状況 発電機出力 EXコイル 元電源(黒)


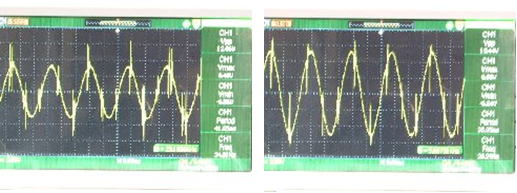
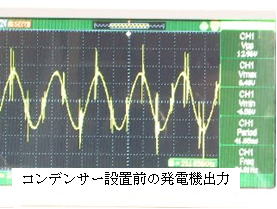
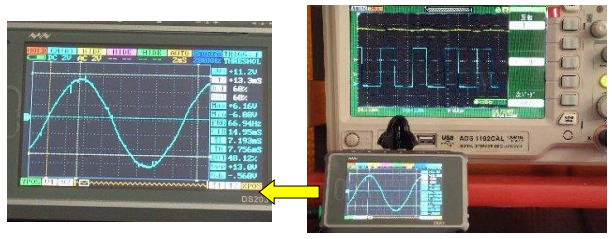
対策前の発電機出力波形
ちょっとした対策後 スパイクノイズが減少し正弦波の電圧が上昇した。
正弦波の周波数は50~80Hzの中に入っており、PWMの周期は32(us)だったはずなので、このスパイクノイズはどうして生成されているか??? 原因究明が必要!
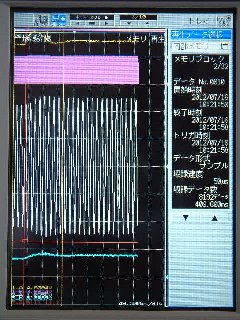
PWMの信号を確認する
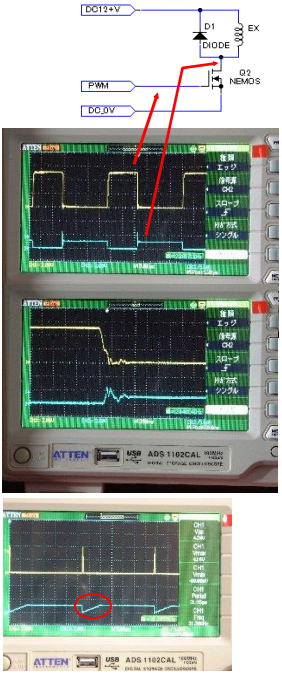 |
DC12+Vは試験のため、安全を考慮し、DC+10Vを接続している。 発電機を約、1700min-1で回転させ、90Rで電圧を上げて行った或る値の観測データです。 (G)-(S)間(黄色)及び(D)-(S)間(水色)をシンクロスコープで波形を確認した。 写真は上段が(G)-(S)間の波形である。 縦軸は1目盛りが2(V)になっている。ただし、下段はExコイルの逆起電圧を考慮し、プローブで1/10としている。 又横軸の1目盛りが5(μs)で1周期32(μs)から、周波数は31.25kHzでPICの設定通りである。 しかし、(D)-(S)の波形では、逆起電圧を防ぐためのD1を設置したが、 (G)信号がON→OFFの時EXコイルによる逆起電圧と思われるスパイクが観察出来た。電圧は電源電圧10(V)に対し、24(V)で2.4倍の電圧となっている。 ここの部分を時間的に拡大した。 1目盛りが250(ns)で(G)信ON→OFFしてから50(ns)から(D)-(S)間の電圧が出始め、電源電圧まで安定するのに500(ns)かかっている。 対策として、この期間を(D)-(S)間にコンデンサーを入れ逆起電圧が発生しないように、緩やかにON→OFFさせる事にする。 Exコイルの定格を試験から15.6(V)、3(A)として負荷を5.2(Ω)とし時定数を500(ns)とすれば、C = 500×10-9/0.7R = 137×10-9 = 0.137uFと言う事になる。 手持ちに0.1uF(50V)しかなくどれ位の時定数になるか計算すると 365(ns)になるので、これを設置し、測定する。 試験のため、Ex電圧が低いので、電流は非常に少なく、効果の時間は相当時間は長くなった。 |
 |
 |
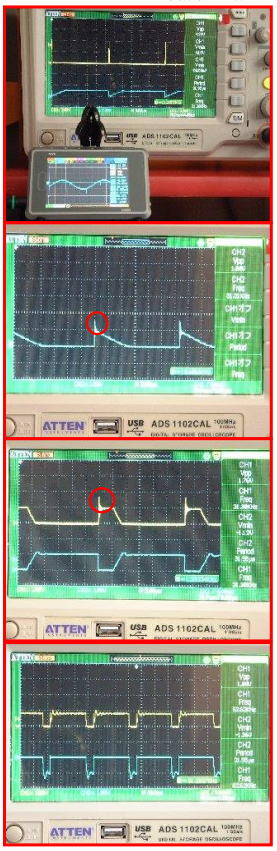 |
90R設定『9E』3.16(V) (OUT Vpp 6.5(V))で 入力電流 0.037(A) 上段が(G)-(S)間電圧で、下段が(D)-(S)間電圧、下段のシンクロスコープが発電機出力電圧を表示している。 90Rの出力が小さいため、ゲート信号は瞬間となっているが、(D)-(S)間にコンデンサーを入れた事により、(D)-(S)のON→OFFまでの時間は7.5(us)となり、ON→OFFの信号時のスパイクは無くなったはずの発電機の出力波形には、小さくなったが、まだスパイクが残っているので、Exコイルの両端の電圧波形を単独で測定した。 結果まだスパイク波形が入力電圧に対し1,6倍の電圧が出ている事が判った。 (D)-(S)間の電圧に電源電圧以上のスパイク波形が無いのに、なぜコイル両端に電圧が出ているのか??? 又、今回90Rの設定が小さくPWMの幅が少ないため、何時の時点でスパイクが出ているのか不明のため、90Rを『14b』6.62(V)まで上げ、Exコイルの両端と(D)-(S)間の電圧をシンクロスコープで測定した結果、OFF→ONの時に出ている事が判った。 電源供給端にコンデンサーを入れ測定した結果スパイク波形は無くなった様だが発電機の出力波形には、以前スパイクノイズが入っている。 ただし、同じ90Rの設定値でも、ONの時間が長くなっており、これはAD入力にスパイク波の影響が少なくなって、発電機出力の正弦波の割合が多くなった為と考えられる。 なお、まだ発電機出力にスパイク波が残っているのは、この方式では、Exコイルに、直接PWMの方形波が入るため、これ以上の対策は無理と考えられる。 次は、LC平滑回路にして特性を確認する。 特に、リップルの除去と応答性能については確認が必要と思われる。 ダイレクト駆動方式の限界から右図のLC平滑回路を追加してExコイルにパルスではなく連続した電流を流す事によりスパイク波形を発電機の出力に出ない様にするのです。 |
■設計再確認
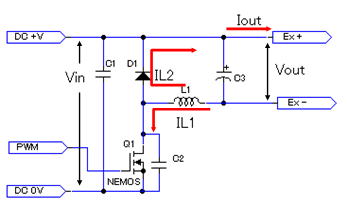 |
Q1のFETがONの時にL1に流れる電流をIL1とすると IL1=(Vin-Vout)*Ton / L Q1のFETがOFFの時にL1に流れる電流はD1を通して流れます。 VdはD1の順方向電圧 IL2=(Vout-Vd)*Toff / L L1=40~236(uH) C3=25(uF) インダクタンスの測定はスライダックと電流、電圧を測定して算出した。 ●電圧計METEX P-10 ●電流計HIOKI 3256 電流10(A)MAX ●スライダック 東京理工社 100V 0-130V 5A(MAX) |
 |
今回は作成する時間が無いので、手元に有る部品を使用した。 L1=1.88(mH) C3=47(uF) 上記部品を回路図の様に今回作成た基板に取り付けた。 Ex元電源はDC 15(V)90Rを『14b』6.62(V)で設定し、ADS1102CALでExの両端電圧(黄)及びD1の両端の電圧(水色)を表示させ、DS203で発電機電圧を測定した結果、発電機電圧に若干スパイク波形は有るものの、相当改善されている。 |
5.発電機励磁装置の動試験(インデンシャル応答)
まず、先に記載の仕様データしか無いため、AVRを使用しない試験の後、AVRの出力FETの仕様を決定し、回路設計・製作後、AVRを使用した試験を実施する。次に、今回の試験はこの発電機の試験ではなくAVRの試験であることから、無負荷状態とできれば、モータの出力以内の発電機出力で試験をする。
・試験日 2012年7月16日10:30~
・気温 33.4℃最終34.5℃ 晴れ
・測定器 記録オシロ NEC omniaceⅡ RA1300R サンプリング時間50 (μs)
直流電源 IWATSU SP6005P
電圧測定 METEX P10
・90R,90Sの設定 180(384),140(320) 20%の変動
(1)下降インデンシャル応答試験
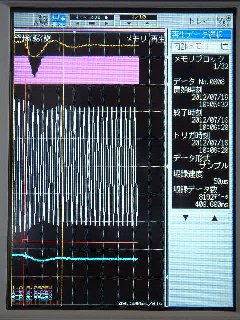
試験状況と 試験結果(オシロ写真)
 |
 |
PWMの信号は32μs周期に対しオシロのサンプリングが50μsのため、信号は違った形式で見えている。(平均値?) また、インデンシャル10ms後位にノイズの様な信号が励磁電圧とA/Dの入力に出ているので、時間的に拡大して表示してみた。 約2000(us)=2(ms)の間隔で、上げ-下げ信号が出ている事が判ったがこの2(ms)は本装置のAVR制御周期でもある事から、何れ解析する必要が有る。 A/D入力信号にまだ脈流が有り、制御周期も2(ms)と短いことから、これらが関係している可能性もある。 制御としては、2波(約250ms)程度で安定しているのが判り、概ね良好である。 |
 |
安定までの時間を短縮するには、平滑回路のL1とC3の時定数を短くすると良くなると思うので、次回試験をして見たい。(リアクタンス測定器購入後) |
(2)上昇インデンシャル応答試験
試験状況と 試験結果(オシロ写真)
 |
 |
オシロの電子データをエクセルでグラフ表示
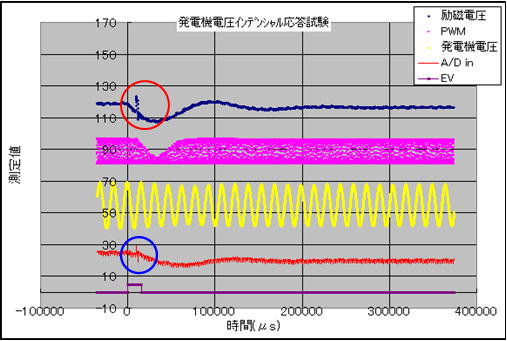 |
PWMの信号は32μs周期に対しオシロのサンプリングが50μsのため、信号は違った形式で見えている。(平均値?) また、インデンシャル10ms後位にノイズの様な信号が励磁電圧とA/Dの入力に出ているので、時間的に拡大して表示してみた。 約2000(us)=2(ms)の間隔で、上げ-下げ信号が出ている事が判ったがこの2(ms)は本装置のAVR制御周期でもある事から、何れ解析する必要が有る。 A/D入力信号にまだ脈流が有り、制御周期も2(ms)と短いことから、これらが関係している可能性もある。 制御としては、2波(約250ms)程度で安定しているのが判り、概ね良好である。 |
 |
安定までの時間を短縮するには、平滑回路のL1とC3の時定数を短くすると良くなると思うので、次回試験をして見たい。(リアクタンス測定器購入後) |
(3)上昇インデンシャル応答試験
試験状況と 試験結果(オシロ写真)
 |
 |
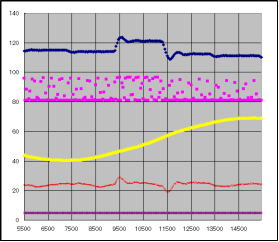
オシロの電子データをエクセルでグラフ表示
 |
インデンシャル750ms後位にノイズの様な信号が励磁電圧とA/Dの入力にまた出ているので、時間的に拡大して表示してみた。 先ほどと同じ様に、約2000(us)=2(ms)の間隔で、上げ-下げ信号が出ている事が判ったがこの2(ms)は本装置のAVR制御周期でもある事から、何れ解析する必要が有る。 (表示の相では変化が少ない様に見えるので、その他の相も観測する必要がある) 制御としては、2波(約250ms)程度で安定しているのが判り、概ね良好である。 |
 |
6.将来試したい回路
今後モータの制御も行うことから、下記内容の制御も検討して行きたい。D1の代わりにFETを使用する概略回路
 ●電源側にコイル負荷を接続する方法
●電源側にコイル負荷を接続する方法FET置きかえた場合は、コイルと並列するSWは方向が逆となるため、PMOSを使用します。
しかし、入力がDC12V程度で有れば良いのですが、入力電圧が高圧になればなるほど(S)-(G)間電圧差が大きくなり制御信号の回路も難しく(NMOS側の制御と絶縁し尚且つ-電源を作る必要が出てくる)なります。
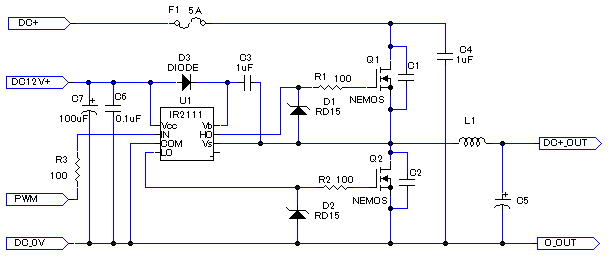
●FETで直接EXコイルをドライブしない方法(可変速機)
次ぎページの回路を参照してほしい、EXコイルには、連続した電流を流す様にするため、EXコイルを右側、『DC+_OUT』『0_OUT』間に接続し、連続する電流を流す、PWMで制御する直流の安定化電源で供給する回路へ変更する。
この事により、高効率のリニアな制御が可能となる。
下と上のFET制御回路を絶縁または、高抵抗化する必要が出てくるが、単一電源で制御が出来るIC(IR2111)を使用する事により、上記回路から見れば、簡単になる。
ただし、リップルを小さくするために使用している回路上のL1はQ1,Q2でPWM及びSWによる制御で入り切りをするため、上記のEXと同じ逆起電力を発生しているので、この事については、同じ損失を少なくする必要が出てくる。
では実際の回路設計(簡便)に挑戦して見る。
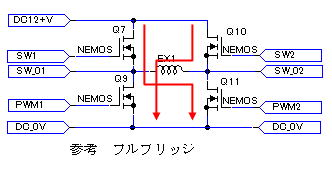
今回の回路は、励磁装置から見れば、SWになるFETが片側だけのため『ハーフブリッジ型』のPWM安定化電源回路と言える。(フルブリッジについては参考図を参照)
●高効率励磁回路
ZVS(Zero. Volt Switching)方式の電源装置の設計方法について
先に説明した回路に加え、FETの(D)-(S)間にコンデンサーを入れる事により、効率向上を図るためにZVSと言う方式を採用したい。