
1.速度調整装置概要
この回路はμ水車の場合、流量調整バブルはあるが、コスト低減のため自動的に動作できる流量調整装置は設置しない。 |
このため、速度調整装置は水車発電機の発生電力= 負荷電力とするため、発生した電力に対し負荷を差し引いた残りの電力をこの速度調整装置を通して②抵抗器で電力を消費させる。 このことから、速度調整装置は左図の様な構成になる。 ・周波数検出器 検出には多くの方法があるが、出来るだけ水車発電機を改造したくないため、今回は発電機電圧を加工して周波数を検出する。 ただし、この方法は、ノイズに弱いため実際に使用して確認をしたい。 |
 |
左図が概略回路図になる。 発電機電圧の加工方法は、発電機母線にコンデンサと抵抗を接続し、抵抗の逆起電圧を飽和アンプで0-1の信号にする。 この信号線にフォトカプラを接続し発電機母線と絶縁し、PCのインターフェースに接続する。 |
2.制御部(ボードコンピュータBC)
 |
BCは簡単に製作できるように、今回はArduino規格のワンチップマイクロコンピュータで、その中でも高性能なDUE-CH340と言う物を使用する。これも中国で購入すると、送料込みで2,000円程度で入手できる。 仕様については次のページの右表の通り。 このコンピュータの説明書は英語版しかないので、プログラミングには相当の時間が必要と思われるが、この内現時点で使用する機能は、上記周波数検出器の信号をデジタルI/Oに接続し、その信号で割り込み処理と内部タイマー機能を使用して周波数を計測なので全部の機能からすれば、簡単と思うことにしたい。 |
 |
計測した周波数値により、周波数82kHzのPWM信号をPCから出力、降圧装置に渡し、負荷の電力調整を行う。 PWM回路だけなら、OPアンプとのこぎり波発生器を使用してもできるが、PCでどれくらいの機能を付加できるかも試すため、今のところはPCでPWM信号を出す。 |
3.降圧装置
下の回路は降圧型のスイッチングレギュレータの原型である。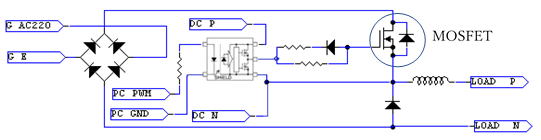 |
|
左から、交流電源を入力に全波整流して直流に変換し、右側のMOSFETによりコイルへの電流を「入り」「切り」する事により、コイルに流れる電流で負荷に電流を供給する回路で、以下にMOSFETの「入り」「切り」で電流の変化概要を説明する。 ●MOSFETが『切り』→『入り』になった場合は 電源→MOSFET→コイルを通り、負荷へ電流が流れる。 この時コイルの両端に加わる電圧と印加時間によりコイルを通る電流は変化し、印加時間経過と共に(コイルから出る磁力線が多くなるに従い)電流が多く流れていく。(最終的にはMOSFET+コイル+負荷の合成インピーダンス分に流れる電流による逆起電圧と電源電圧がつり合うまで電流の変化が継続する。) ●MOSFETが『入り』→『切り』になった時は、コイルからの電流はMOSFET下のダイオードを通してコイルの電流は還流するが、外部からの電圧供給が無くなったコイル電流は(コイルから出ていた磁力線が少なくなるに従い)少なくなって行く。 なおMOSFETの『入り』→『切り』制御はゲート側に接続されているフォトカプラーを通して、PCからPWM信号により制御される。このPWM信号によりコイルの電流を制御することにより、電力を制御する事になる。 以下文章だけでなく、現場写真や波形を入れながら、説明したい。 |
 右写真が試作した物を試験している場所で、降圧装置はプリント基板を作成せず空中結線のため、試験中のEMI(レコード屋では無く、電磁障害Electro Magnetic Susceptibillty)は相当酷いと思われる。(人体に影響しないか心配) 右写真が試作した物を試験している場所で、降圧装置はプリント基板を作成せず空中結線のため、試験中のEMI(レコード屋では無く、電磁障害Electro Magnetic Susceptibillty)は相当酷いと思われる。(人体に影響しないか心配)降圧装置の交流電源はスライダック(写真左下)及び絶縁トランスを商用電源の間に入れている。 注意1:後で説明するが、電源側に接続しているCTとシャントがこれである。 拡大写真は降圧装置で、放熱板に取り付けたMOFETと上にはMOSFETの温度上昇を検出する温度素子(洗濯ばさみで挟んでいる。) |
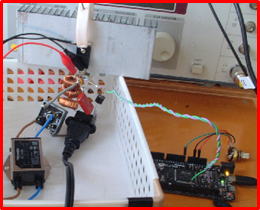 その下には、見えないがフォトカプラ、その下左に銅色のエナメルはコイル、その右にはコイル電流還流用のダイオード、その左下の黒い四角い物が、全波整流器、右が②抵抗器用のコンセント、またその下左側が回路図にはないが、EMI低減用のラインフィルター、右側がPWM信号を発生するPCとPCに接続したVRである。 その下には、見えないがフォトカプラ、その下左に銅色のエナメルはコイル、その右にはコイル電流還流用のダイオード、その左下の黒い四角い物が、全波整流器、右が②抵抗器用のコンセント、またその下左側が回路図にはないが、EMI低減用のラインフィルター、右側がPWM信号を発生するPCとPCに接続したVRである。 |
 紹介:これからよく出てくるオシロ波形は、銭が無いので、中国RIGL製のオシロスコープMSO5104と言う物の画面をHTML経由でコピペして使用している。
紹介:これからよく出てくるオシロ波形は、銭が無いので、中国RIGL製のオシロスコープMSO5104と言う物の画面をHTML経由でコピペして使用している。 |
それではスライダックで50Vに交流電圧を調整してVR値を約430※1に設定した時の②抵抗器(抵抗値70Ω)の電圧をオシロで測定した結果の概略を説明する。なおPWM信号は絶縁ができない関係から、同じオシロで測定はしていないため、想定の線(赤線)を描いているので、注意下さい。 ※1左の図はWindows OS上のパソコンにArduino IDE(統合開発環境※2 Integrated
Development Environmentと言う)及びIDE付属ターミナルソフト(PCとUSB経由で通信した内容を表示するアプリケーション)である。 ※1左の図はWindows OS上のパソコンにArduino IDE(統合開発環境※2 Integrated
Development Environmentと言う)及びIDE付属ターミナルソフト(PCとUSB経由で通信した内容を表示するアプリケーション)である。IDEにはPCのプログラムが表示されており、COM4と表示されているターミナルソフトには、VRの値(429)が表示されている。 ※2統合開発環境とは、ソースコードを記述するエディタ、ソースコードからプログラムを生成するコンパイラ、コードの不正を発見・修正するデバッガなどのプログラム開発ツールをひとまとめにした開発環境のことをいう。なおArduino IDEではソースコードはCライク(Like)な言語で記述できる。(私のような爺でも書けるプログラムで、後で説明したいと思う) |
脱線したが、下の写真がオシロの波形である。上段の横軸は2ms/DIV 下段が5us/DIV 赤線の周波数は12.2us≒81.97kHz、デューティ比=430/1024=0.42である。 |
 |
| コイル電流を説明するとONになってからコイル電流が徐々に流れ磁力線としてエネルギーを蓄えられ、②抵抗器に電流が流れて行くに伴い電圧が上昇して、OFFになってから磁力線によるコイルに蓄えられたエネルギーを電流として放出している状況が判ると思う。この波形は前に簡単に説明したアクティブタイプの内、連続通電モードに似ていると思う。 ①速度調整装置については、今回は、ここまでにしておく。 理由は現在直面している疑問点からシステムの開発が停滞している。 疑問点の概要としては、コイルとEMIであり、多少は前に進んではいるが・・・。 |
●コイルは左下写真に示すリング状の物に銅線を巻いて上に写っているコイル(リアクタンス)として使用しているが、これでとんでも無く時間を浪費している。 これも基礎知識不足(磁気飽和と自己共振につてい良く理解をしていなかった事から)?脳みその劣化・欠如及びコスト低減から中国製に手を出してしまったことから、いくつものMOSFETや還流ダイオードを破損させてしまった。 これも基礎知識不足(磁気飽和と自己共振につてい良く理解をしていなかった事から)?脳みその劣化・欠如及びコスト低減から中国製に手を出してしまったことから、いくつものMOSFETや還流ダイオードを破損させてしまった。リング状の物は、鉄粉をベースにしたコアで色々な材料から作られており、それぞれ特性が違うことから、BH曲線を測定したりしたが、現在気に入ったコアに出会っていない。 |
| ●EMIについては、MOSFETのON、OFF時のラッシュ電流により周辺に電磁波として拡散する現象で、今回交流電源電圧を80V~100Vに変化させた時、オシロのタッチパネルに動作不具合を起こした。 これについは、回路をプリント基板で作成し、拡散している電磁波の強さや周波数を確認する必要があるが、まず回路に流れる電流を測定する方法から疑問が出た。  ②速度調整装置の入力交流電源の電流を当初CT(HIOKI9694)で測定していたが、あまりにもON時ラッシュ電流が大きいので、シャント(1Ω)とCTで電流値を比較した。右図がその時の波形で、条件は ②速度調整装置の入力交流電源の電流を当初CT(HIOKI9694)で測定していたが、あまりにもON時ラッシュ電流が大きいので、シャント(1Ω)とCTで電流値を比較した。右図がその時の波形で、条件は入力交流電源電圧25V 電流0.08A 黄=シャント青=CT(10mV/A) 上段 2ms/DVI、下段5us/DVI シャントとCT波形に違いが出た。 MOSFET ON時のラッシュ前後の電流値については CT DC分※3 +3mV= + 0.30A ラッシュ分 +11mV~-12.5mV = 1.1~-1.25A シャント DC分+140mV=+0.14A ラッシュ分 +70mV~-80mV =0.07~-0.08A ※3 DC分と言っても瞬間を示しており、全体的に言えばオシロ上段の60Hzの波形で一番+側で大きい値の時のラッシュ部分で無い交流波形値を示している。 |
 左図は 左図は上段 2ms/DVI、下段50ns/DVI でラッシュの周波数はなんと40MHzだった。 ・の波形の原因は?対策は? ・ラインフィルターが入っているのになぜ出ているのか? が判らない! |