1.準備
(1)動作させたいデバイス
(2)RaspberryPiのI/O設定概要
|

2.I/O (装置状態/装置制御) を使う
(1)動作確認用の回路
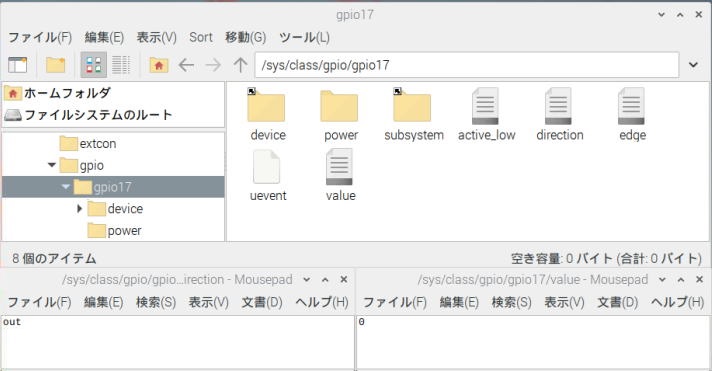
(2)GPIOを使用するための準備
(3)LXTerminalから出力制御
(4)LXTerminalから入力制御
(5)PHPで動作させるには
(6)PHPで動作確認
|














3.1ワイヤー 温度センサー DS18B20 を使う
(1)の1-Wire(DS18B20)の設定 設定を変更する。 |
|||
 |
⇒ |
 |
設定で[OK]をクリックするとRaspberryPiの再起動を聞いてくるので、再起動を行ってください。(2)起動後のモジュールリスト確認
|
(3)RaspberryPiにDC18B20を接続
 |
 |
 |
(4)RaspberryPiのPinNoの変更方法
温度検出の信号線を接続するデフォルトピンはGPIO=4 PinNo=7だが変更する場合は
/boot/config.txt は下記の様になっていると思う。
|
(5)RaspberryPiの動作確認
測定結果のファイルの有無確認
ファイルの概要 t=は1000倍の値になっている。 2回目の温度測定値:1回目測定後に温度素子を手で触り温度を上昇させた。 |
4.I2Cを使う
|
出来るだけ簡単にするため新たにインストールはしない方向で進める 今回はインストールされているi2c-toolsコマンドを使用する。 (1)I2Cのツールをインストールする。最初からインストールされていた。
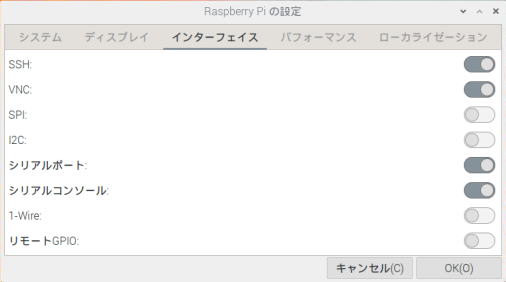
(2)RaspberryPiの設定画面でI2CをONにする。 |
(3)接続 ADS1115の例
SDA,SCLは抵抗 3.3kΩ を 3.3V 回路に接続(プルアップ) すること。
接続端子
|
接続回路
|
(4)コマンドで動作確認
a.i2cdetectを使用したI2Cに接続されている機器を検出しID番号を表示させる ADS1115をI2Cに接続状況 注意 ADS1115のSCL,SDAプルアップ抵抗を外すこと。
|
|
b.「i2cget」と「i2cset」を使い動作確認する 1V又は4Vを入力電圧として印加し動作確認を行った。 ① A0の入力電圧確認
4(V) 0x057d= 4.000625(V) ②A1の入力電圧確認
4(V) 0x087d = 4.001(V) ③A2の入力電圧確認
4(V) 0x037d = 4.000375(V) ④A3の入力電圧確認
4(V) 0x027d = 4.00025(V) 動作確認状況  |
5.UARTを使う
|
今回はRaspberryPiのシリアル信号をパソコンのUSBに接続して確認する。 RaspberryPiはシリアル(UART)信号なので変換IC CP2102を使用してパソコンのUSBに接続する。 パソコン側にこのCP2102ドライバーがインストールされていない場合は ここをクリックしてインストールする シリアル信号の送受信には各々ターミナルソフトを使用します。 パソコン側は TeraTerm と言うソフトを使用する。 ●最初にパソコンからシリアルコンソールでRaspberryPiのシェルにアクセスします。 (コンソールとは入出力装置を意味する) 次にシリアルコンソールによる接続をやめ、 ●RaspberryPi側はGtk Termと言うソフトを使用しタームソフト相互による通信を確認する。 (1)シリアルポートの接続
(2)RaspberryPiの設定シリアルポートとシリアルコンソールがONになっていることを確認する。 (3)パソコン側にソフトのインストール
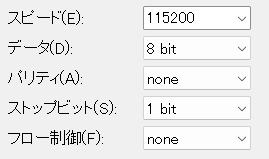
(4)TeraTermの設定
(5)接続方法RaspberryPiに接続する方法は2つある下記を選んでください。 ①f-1 RaspberryPiのコンソールを使用する ②f-2 RaspberryPiのコンソールを使用しない a.RaspberryPiのコンソールを使用する
|